Ver bajo el agua ya es difícil en condiciones ideales; hacerlo en puertos, ríos o zonas de trabajo con sedimentos en suspensión puede volver casi inútiles a las cámaras convencionales. Un trabajo presentado en la conferencia ICRA 2026 y difundido por MIT propone una salida práctica a ese problema: fusionar imágenes ópticas con datos de sonar para que vehículos submarinos construyan mapas tridimensionales más robustos incluso cuando el agua está turbia.
La técnica se llama Sonar-MASt3R y fue desarrollada por Amy Phung, del programa conjunto MIT-Woods Hole Oceanographic Institution, junto con Richard Camilli. La idea parte de una limitación conocida. Las cámaras pueden ofrecer detalles visuales finos, pero dependen de buena iluminación y visibilidad. El sonar, en cambio, sigue funcionando en agua opaca, aunque entrega una representación mucho menos intuitiva y con menos detalle visual. El nuevo método intenta aprovechar lo mejor de ambos mundos.
Según el paper enlazado por MIT, el sistema usa información óptica para extraer correspondencias densas entre imágenes y la combina con pistas geométricas obtenidas a partir de una reconstrucción acústica en 3D. El objetivo es producir mapas útiles en tiempo real, algo que varias aproximaciones previas no lograban con suficiente velocidad o robustez en entornos turbios y desordenados. Los experimentos reportados incluyeron datos tomados con una configuración en la que cámara y sonar iban montados juntos y se probaron distintos niveles de turbidez, desde agua relativamente clara hasta condiciones mucho más opacas.
La relevancia del avance está en sus aplicaciones concretas. Un sistema así podría mejorar la percepción de robots usados en exploración científica, inspección de infraestructura submarina, mantenimiento industrial, recuperación de objetos o tareas de rescate. En muchos de esos escenarios, perder visibilidad no es un detalle menor: puede significar que una operación deba hacerse a ciegas o directamente suspenderse.
De todos modos, todavía no conviene presentarlo como una solución cerrada. La información disponible proviene de un paper aceptado en ICRA 2026 y de una nota institucional del MIT, no de una validación extensa en despliegues operativos de largo plazo. Falta saber cómo se comportará el sistema en misiones más complejas, con corrientes, fondos variables y distintos tipos de ruido acústico o visual. También habrá que ver el costo computacional real y qué tan fácil es integrarlo a plataformas submarinas ya existentes.
Aún con esas cautelas, la historia supera el umbral de simple anuncio tecnológico porque describe un método concreto, con evaluación experimental y una pregunta ingenieril clara: cómo devolver percepción espacial útil a robots que trabajan donde la visión sola deja de servir. La fuente periodística de MIT se complementó aquí con el paper técnico enlazado como respaldo primario.
New imaging system sees through murky waters · MIT News Research
MIT News | Massachusetts Institute of Technology · Imagen acompañante del artículo fuente; atribución preservada · Fuente de imagen
Phung, A., & Camilli, R. (2026). Sonar-MASt3R: Real-Time Opti-Acoustic Fusion in Turbid, Unstructured Environments [Preprint, aceptado en ICRA 2026]. arXiv. https://doi.org/10.48550/arXiv.2603.13585
Relacionadas por categoría
Ver mas
Vórtices en el agua hacen girar micro-rotores sin electricidad
Un experimento mostró que pequeños vórtices en la superficie del agua pueden hacer girar objetos diminutos sin imanes, corriente ni reacciones químicas, una pista útil para fabricar estructuras microscópicas delicadas.
Pisos móviles podrían reducir el balanceo de los edificios altos por el viento
Un equipo probó en túnel de viento un diseño que deja moverse parte de la masa del edificio y logró recortar más de 70% de las aceleraciones máximas en un prototipo de 300 metros.
Nanopartículas de rutenio convierten un contaminante del agua en cloruro inofensivo
Un estudio de laboratorio mostró que nanopartículas de rutenio pueden destruir perclorato capturado en residuos del tratamiento de agua potable y transformarlo en cloruro.
Más de la misma fuente
Ver mas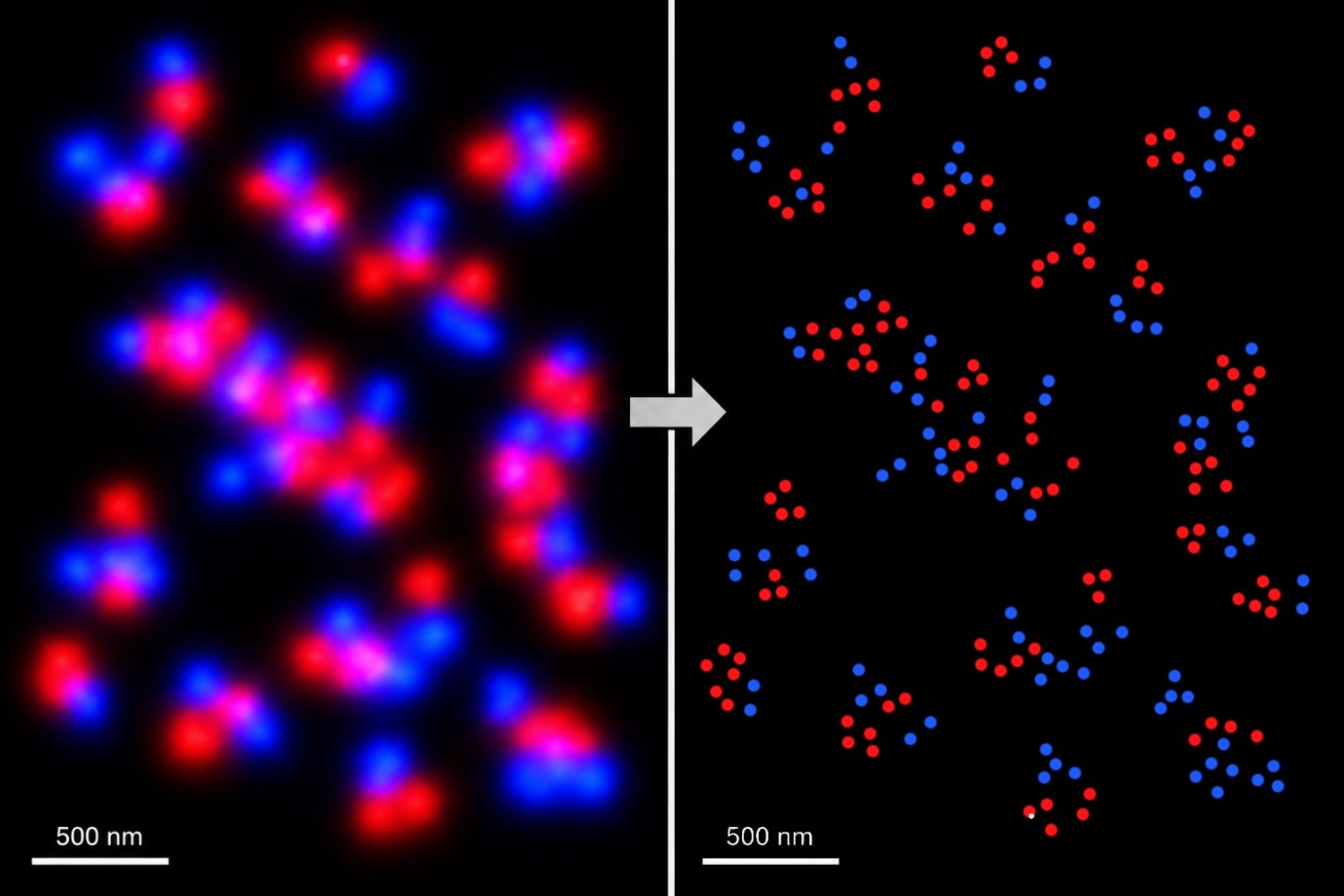
U-STORM rompe un límite clásico de la microscopía de superresolución
Un trabajo en Nature Nanotechnology describe una técnica que usa nanopartículas intermitentes para localizar estructuras moleculares con una precisión inédita y simplificar la imagen multicolor.
Un hilo elástico reciclable busca reemplazar al spandex en la ropa
Ingenieros del MIT desarrollaron un hilo basado en polietileno que puede fundirse y volver a hilarse al menos 10 veces sin perder la elasticidad y resistencia que hoy vuelven difícil reciclar mucha ropa deportiva.
Nubes difusas de materia bariónica “pérdida” rodean a la mayoría de las galaxias
Un análisis con ráfagas rápidas de radio sugiere que buena parte de la materia ordinaria faltante del universo está dispersa en nubes muy extendidas alrededor de grupos de galaxias.
Más del mismo autor
Ver mas
Cómo las mitocondrias ayudan a encender la inflamación del envejecimiento
Un estudio en Nature identificó una vía metabólica en mitocondrias que ayuda a activar la inflamación de células envejecidas y mejoró indicadores de salud en ratones al bloquearla.
Un polímero 2D avanza en la producción de hidrógeno solar
Un estudio en Nature presentó un fotocatalizador polimérico bidimensional que logró dividir agua con luz, un paso relevante para producir hidrógeno sin usar combustibles fósiles.

Una nueva mirada al grafito muestra por qué cargar una batería no es un proceso parejo
El litio no entra de forma uniforme en el grafito: un estudio observó saltos rápidos y localizados que ayudan a entender mejor los límites de la carga rápida.