Un equipo de investigación presentó una estrategia de navegación robótica inspirada en las abejas melíferas que podría ayudar a robots muy pequeños a orientarse y volver a su punto de partida sin depender de sistemas de cómputo pesados. El trabajo combina integración de trayectoria con una memoria visual aprendida mediante una red neuronal muy compacta.
La navegación autónoma sigue siendo un desafío para robots pequeños, especialmente drones livianos o dispositivos con baterías y memoria limitadas. Los sistemas convencionales suelen apoyarse en mapas detallados, sensores complejos y procesamiento intensivo, algo difícil de llevar a plataformas diminutas.
Las abejas, en cambio, consiguen desplazarse a largas distancias con cerebros minúsculos. Para hacerlo combinan varias estrategias, entre ellas la integración de trayectoria —una estimación de dónde queda el punto de partida según distancias y direcciones recorridas— y el uso de referencias visuales del entorno.
Según el artículo en Nature, los investigadores desarrollaron un enfoque llamado Bee-Nav, inspirado en los vuelos de aprendizaje que realizan las abejas cerca de su nido antes de aventurarse más lejos. Durante un trayecto inicial corto, el robot registra vistas panorámicas y entrena una pequeña red neuronal para asociar esas imágenes con un vector de regreso a casa.
Después, el robot puede alejarse mucho más usando integración de trayectoria y, al aproximarse a la zona aprendida, corrige el error acumulado gracias a esa memoria visual comprimida en la red neuronal. El estudio indica que la estrategia funciona con recursos computacionales extremadamente reducidos y que permitiría ampliar de forma importante el rango operativo de robots pequeños.
El interés del trabajo no está solo en copiar un comportamiento animal llamativo, sino en mostrar que una solución de navegación más eficiente puede surgir de combinar principios biológicos con aprendizaje automático liviano.
Si este enfoque se traslada bien a entornos reales, podría facilitar robots autónomos más baratos, livianos y energéticamente eficientes para tareas de monitoreo, búsqueda, inspección o exploración en lugares donde hoy el hardware limita mucho la autonomía.
También refuerza una idea cada vez más valiosa en ingeniería: que no siempre hace falta más cómputo y más complejidad si se encuentra una estrategia mejor inspirada en cómo resuelven el problema los sistemas biológicos.
Aunque el resultado es prometedor, eso no significa que cualquier robot pequeño ya pueda navegar kilómetros en cualquier entorno. El rendimiento depende de las condiciones visuales, de la calidad de la integración de trayectoria y de que el robot vuelva a una zona donde su memoria visual siga siendo útil.
Además, como suele pasar con trabajos experimentales, faltará ver cómo escala el método en escenarios más cambiantes, con obstáculos dinámicos o condiciones climáticas difíciles.
Efficient robot navigation inspired by honeybee learning flights · Nature
Ciencias.uy / MiniMax image-01 · Imagen generada con MiniMax image-01 para Ciencias.uy; uso editorial no comercial; CC BY 4.0 · Fuente de imagen
Relacionadas por categoría
Ver mas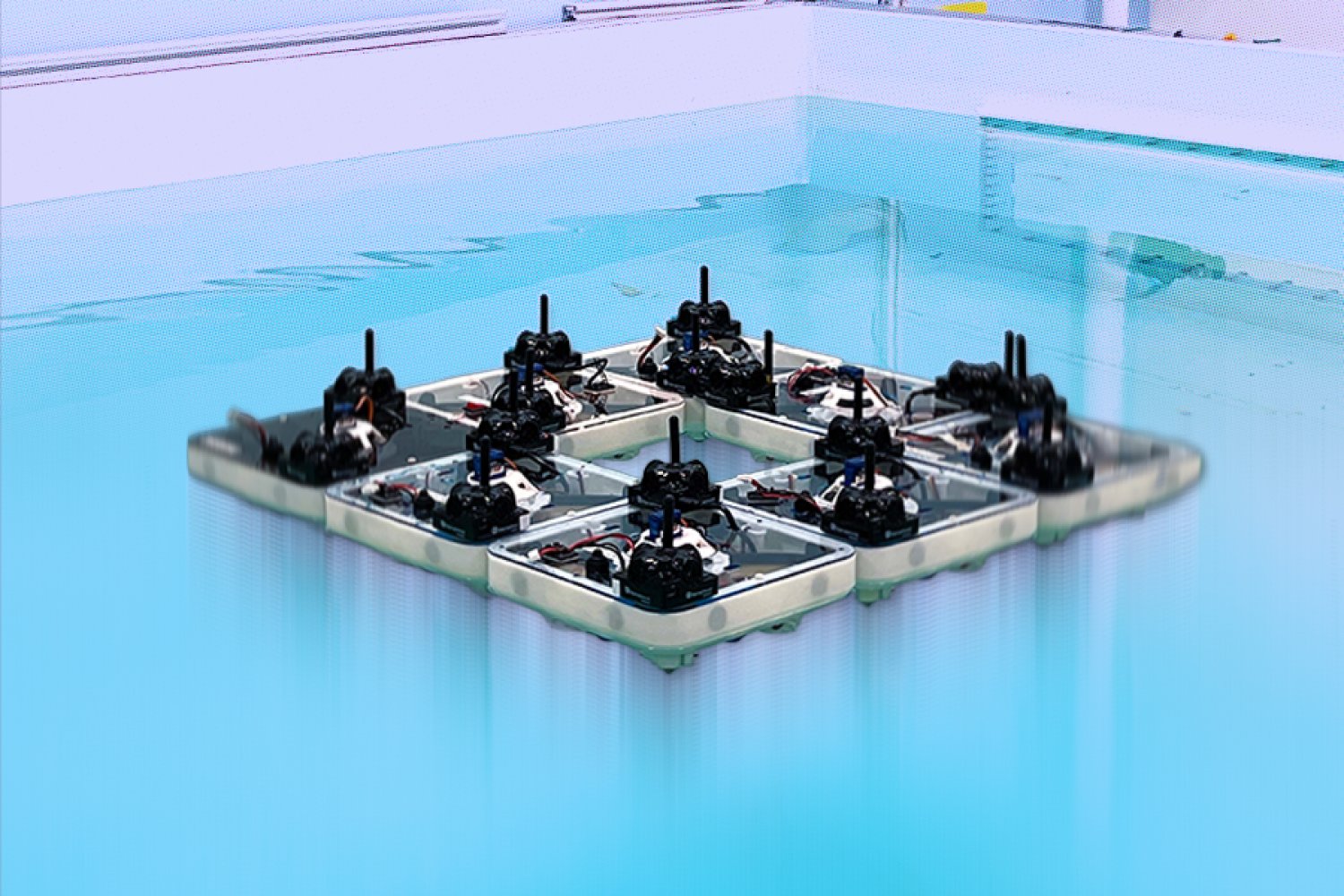
Pequeños robots acuáticos ya pueden ensamblarse en plataformas flotantes
Un equipo del MIT presentó FloatForm, un enjambre de robots acuáticos que puede unirse, separarse y volver a organizarse para formar estructuras flotantes temporales sobre el agua.
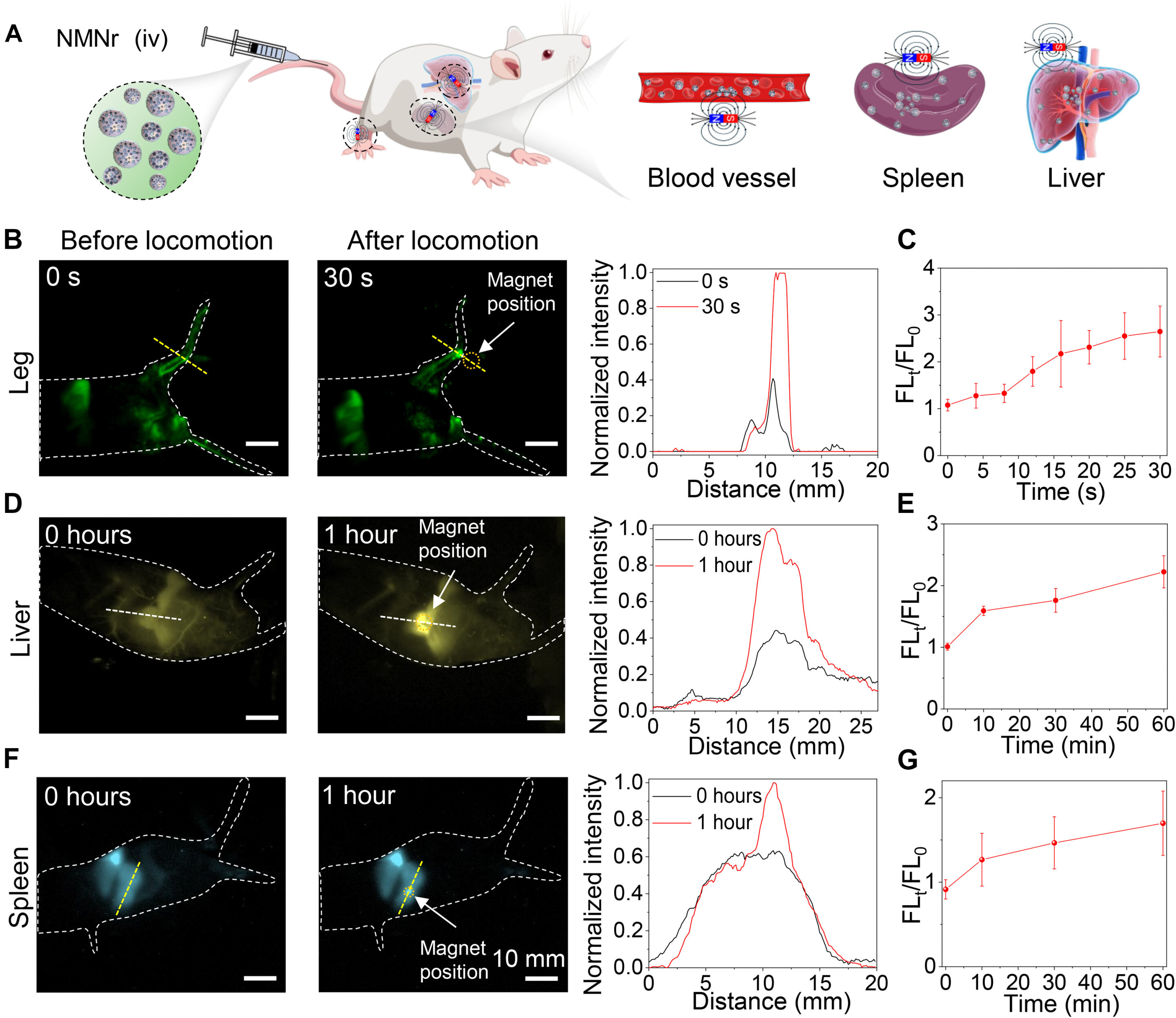
Nanorobots guiados por infrarrojo lograron llevar fármacos con más precisión
Un equipo desarrolló una plataforma de visión infrarroja que permite seguir y dirigir nanorobots dentro del cuerpo en tiempo real, con mejores resultados de entrega en ratones.
Microrrobots del tamaño de un cabello combinaron tres funciones contra el cáncer en pruebas preclínicas
Un equipo desarrolló microrrobots biodegradables guiados por campos magnéticos, visibles en tiempo real y capaces de aplicar calor localizado sobre tumores en pruebas preclínicas.
Más de la misma fuente
Ver mas
Un polímero 2D avanza en la producción de hidrógeno solar
Un estudio en Nature presentó un fotocatalizador polimérico bidimensional que logró dividir agua con luz, un paso relevante para producir hidrógeno sin usar combustibles fósiles.

Una nueva mirada al grafito muestra por qué cargar una batería no es un proceso parejo
El litio no entra de forma uniforme en el grafito: un estudio observó saltos rápidos y localizados que ayudan a entender mejor los límites de la carga rápida.
Una puerta oculta del poxvirus podría abrir nuevas vías contra la infección
Un estudio reveló la estructura de un complejo que actúa como puerta en poxvirus y ayuda a liberar instrucciones virales, una pista útil para futuros antivirales.
Más del mismo autor
Ver masUn polímero 2D avanza en la producción de hidrógeno solar
Un estudio en Nature presentó un fotocatalizador polimérico bidimensional que logró dividir agua con luz, un paso relevante para producir hidrógeno sin usar combustibles fósiles.
Una nueva mirada al grafito muestra por qué cargar una batería no es un proceso parejo
El litio no entra de forma uniforme en el grafito: un estudio observó saltos rápidos y localizados que ayudan a entender mejor los límites de la carga rápida.
Una puerta oculta del poxvirus podría abrir nuevas vías contra la infección
Un estudio reveló la estructura de un complejo que actúa como puerta en poxvirus y ayuda a liberar instrucciones virales, una pista útil para futuros antivirales.